使用OptiTrackシステム
- Flex3(旧V100:R2)カメラ 6台
使用ソフトウェア
- TrackingToolsソフトウェア

CD/DVDプレーヤなどの小型電気製品から自動車,航空機,宇宙機器といった産業応用機器まであらゆる製品に使われ、産業の発展に多大な貢献をしている制御技術。平田研究室では、新しい制御理論や制御技術の研究とそれらの実システムへの応用に関する研究を行っている。
宇都宮大学
大学院工学研究科
電気電子システム工学専攻 准教授
平田光男氏
OptiTrack導入の経緯
もともとQuanser社製品のユーザーであった平田先生は、ある日Quanser社の新製品案内でQuaRC®*1を使用した物体の自律制御でOptiTrackが使用されていることを知る。そこでその当時学生が研究していた飛行物体の制御にOptiTrackを使用することを検討し始めた。
http://quanser.blogspot.jp/2009/02/vision-tracking-in-quarc-using.html
上記ではフィードバック制御の最も基本的な実験のひとつとされる倒立振子をエンコーダではなくOptiTrackを使用したヴィジョントラッキングによって実施している例を紹介している。
OptiTrackを購入するに至った理由は、初期導入費用が安いことである。何か新しい研究を進める場合、どうしても最初は予算がつかない。予算がつかないから研究に使用するシステムが導入できない。システムが導入できないから満足できる研究ができない。そんな負の連鎖を断ち切ることができるのがOptiTrackだったというわけだ。三次元剛体動作計測をスタートするためのミニマムのシステムであれば通常の研究費の範囲内に収まる。もちろん計測対象物の大きさ、動作の種類、動作の範囲などにより構成は変わってくるわけだが、平田先生が行いたいと思っている飛行物体1つの三次元剛体動作計測ではまず4台のFLEX:V100R2カメラとTrackingToolsソフトウェアで最低限カバーできたため導入していただくこととなった。この初期導入費用が安いというのは非常にメリットであるそうだ。
*1 MATLAB®のSimulink®上で動作するリアルタイムの制御ソフトウェア
飛行物体自律制御の研究
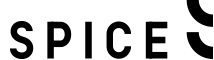
実際にOptiTrackを使用して飛行体制御の実験を行っていたのは2012年3月に修了された修士2年の皆川佳孝さん。飛行機(固定翼機)の形をしているが、通常の飛行機のような飛行ではなく、機首にプロペラをつけロケットのように真上に向かって離陸し、直立でホバリングさせることに成功した。Prop-Hanging Flightと呼ばれるこのような飛行はアクロバット飛行の一種で熟練者でないとなかなか難しい。それを制御理論で実現したことになる。

さらにその後、オイラー角ではなくクオータニオンを用いることで、姿勢角に制約されない自由度の高い制御を実現。ホバリング,方位角制御,円軌道制御,離着陸制御を成功させた様子はこちら。
OptiTrackシステム導入当初は片側だけに4台のカメラをレイアウトして制御をおこなっていたのだが、マーカーの欠落が起き易く方向転換するなど複雑な動きに対応できないため、被写体を囲むようなレイアウトにした。しかしカメラ4台だとどうしても死角が多くマーカーの欠落が生じてしまった。そして翌年カメラを2台増設していただき6台にしてからはマーカーの欠落が減ったとのこと。レコーディングしたマーカーのトラッキングデータを編集することができるのであれば多少のデータ欠落も後処理で修正できるが、リアルタイム制御である以上、リアルタイムに三次元位置姿勢データが欠落なく取得できることが重要となる。OptiTrackはカメラ1台から増設できるので、計測対象物の動作、動作範囲などによって適切なカメラを適切な台数でお使いいただけると非常にパフォーマンスがあがる。OptiTrack FLEX:V100R2カメラは100Hzで計測可能だが、平田研究室では制御するためのコントローラが50Hzであるため、全体的には50Hzで動作している。

設置した実験室
システムの仕組み
位置計測用PCにはMATLAB/Simulinkとその上で動作するQuaRC®、そして、OptiTrackのTrackingToolsがインストールされている。また、飛行体を剛体として認識するように、機体上の反射マーカをTrackingToolsに登録してある。QuaRC®には TrackingToolsのリアルタイムストリーミング機能をAPI経由で使用するSimulinkブロックがあらかじめ用意されているので、プログラミングすることなく機体の6自由度(位置XYZ・方向XYZ)のデータをリアルタイムに取得できる。制御用PCでは、シリアル通信によって位置計測用PCから送られてきた機体の6自由度のデータを使って、スロットル・エルロン・エレベータ・ラーダの各舵角を最適制御理論に基づいてリアルタイムに演算する。その結果は、信号変換器を通してRCプロポへ伝えられ、ホバリングなど自律制御が行われる仕組みになっている。


チャレンジ精神万歳!
「自然の現象を計測する場合は、超ハイスペックで高額なシステムを使い、できるだけ正確にデータを取得するというアプローチになると思うが、人工物を扱っている私たちとしては、例えば300Hzだったら簡単に実現できるところ、何とか100Hzでもできるような制御の仕組みを考えることこそ、やりがいがあるアプローチであると静かに熱い思いを語っていただいた。OptiTrack製品も少しでも低価格で少しでも精度の高いシステムを世の中に提供すべく日々開発を続けていることを考えると、僭越ながら貪欲なチャレンジ精神という部分で共通点があるのかもしれないと感じた。



