








ダウンロード
ソフト・プラグイン・総合カタログ・事例をダウンロード

事例・動画集
納品時のシステムや活用事例をご紹介
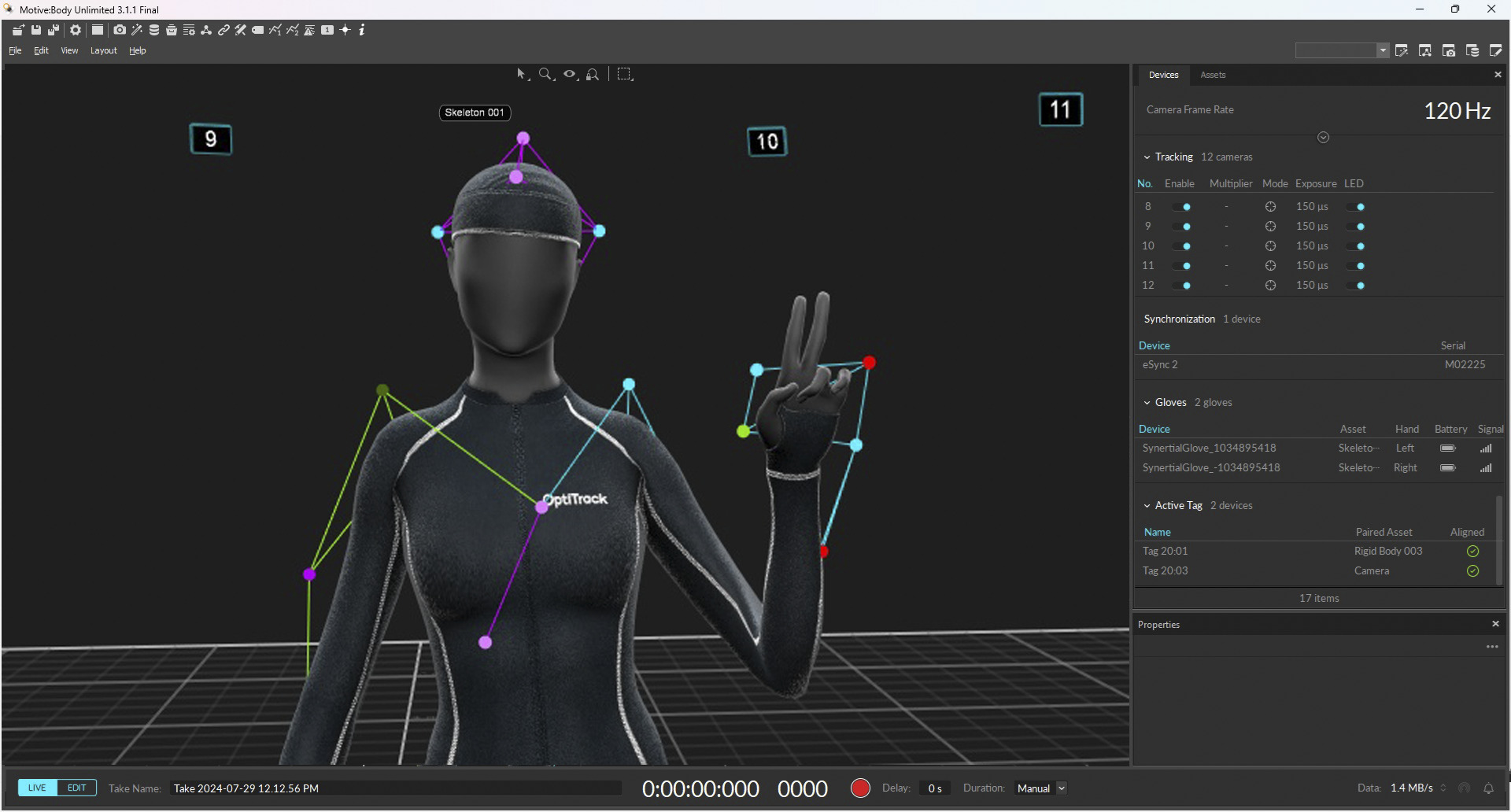
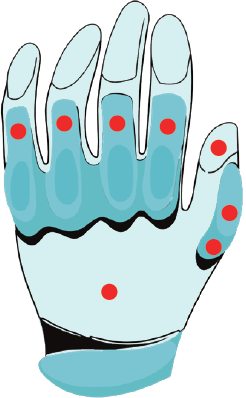
製品一覧
モーションキャプチャーシステムを数種類ラインナップ

who we are
スパイス モーションキャプチャー事業部のご紹介
ソフト・プラグイン・総合カタログ・事例をダウンロード
納品時のシステムや活用事例をご紹介
モーションキャプチャーシステムを数種類ラインナップ
スパイス モーションキャプチャー事業部のご紹介


