名古屋工業大学
機械工学科 佐野・田中研究室
佐野明人教授、福永大輝氏
OptiTrack導入の理由
佐野教授の研究者仲間の間で実際にOptiTrackをお使いいただいている方がいらっしゃり、評価が高かったことから興味をお持ちいただきました。またコストパフォーマンスが高いことが購入に至った理由だそうです。コンパクトなカメラのデザインも気に入っていただき、学部生や院生の方がどんどん使いこなしているのを見て佐野教授にも非常に喜んでいただいております。
効率の良い走行を求めて・・・
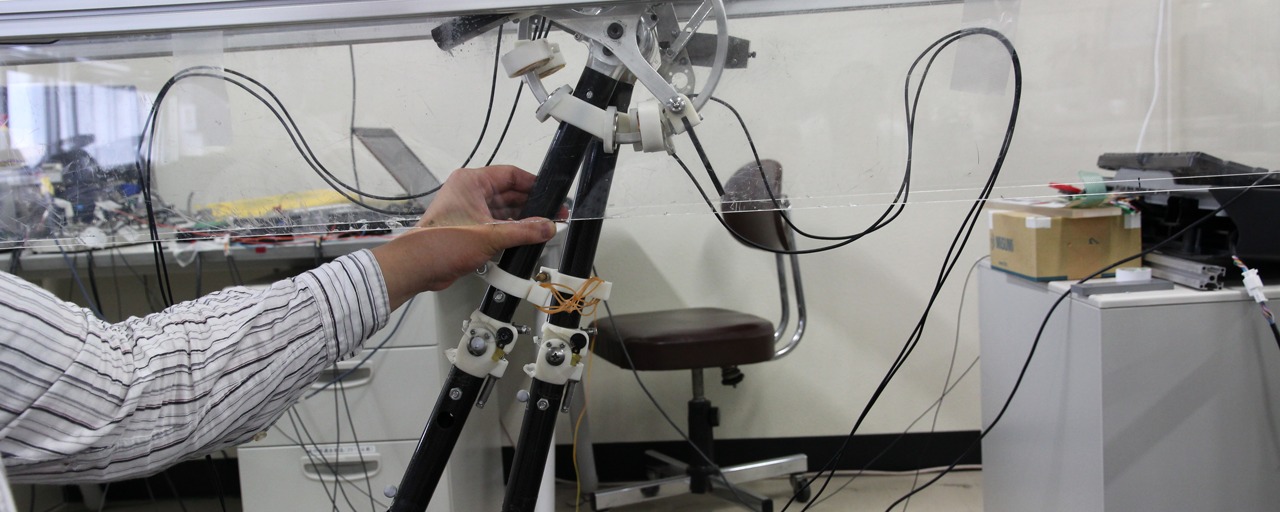
さて今回は院生(M2)の福永さんに走行ロボットの研究についてお話を伺いました。福永さんは効率の良い走行ロボットについて研究しています。7年ほど前に研究室で“起こし回転”という現象に注目したのが始まりです。起こし回転とは、1本のロッドを床面に斜めに適切に投射すると、床面との衝突により水平方向の速度が上昇方向の速度に変換され跳ね上がる現象のことです。モーターなしでも重力効果のみによって下りスロープを歩くロボットについては佐野先生が研究されている通りですが、福永さんの研究では起こし回転のようなロッドがバウンスするような動きを走行に応用しています。脚の開きが最大の時に外部から上方に引き上げる力を加えると安定した走行ができることが知見としてありました。
それをシステムで行う際に、OptiTrackFlex13カメラとMotive:Trackerを使用してロボットの動きの計測を行い、リアルタイムでロボットの脚がどのくらい開いているのか、三次元的に計測を行いながら、その計測データを別の制御用プログラムにリアルタイムストリーミングし、ロボットを上に持ち上げるタイミングを制御していました。(リアルタイムストリーミングするのは無償提供されているNatNet SDKのSampleClient.exeを使用されていました。)その結果、長時間連続での走行を実現することが出来ました。
アメリカンクラッカーを走行ロボットの脚に見立てると、脚が最大に開いた時に上に引き上げる力を与えると脚は閉じる方向に動きます。その要領で、福永さんは走行ロボットに新しくコイルと磁石を追加し、さらに脚の開きデータをフィードバックせず、よりシンプルにあるリズムで電流の向き切り換え、脚の開きを補助することで、上に引き上げる力がより少なくてもうまく走行できる実験に成功しました。

走行ロボット
OptiTrackを使うことのメリットは?

現在はリアルタイムで脚の開きをフィードバックするためではなく、走行ロボットの姿勢を解析するためにOptiTrackを使用していただいております。カメラは天井付近のレールや壁についた板を利用し邪魔にならないようにオリジナル治具で取り付けています。がっちりとした三脚を用意しなくてもよいのはコンパクトなFlex13カメラのメリットです。しかもワイドレンズを使用しているので視野角が広く、あまり十分なスペースが取れない研究室でも十分な計測ボリュームが確保できる点はご満足いただいております。またMotiveソフトウェアのバージョンアップにより、今まで手動で設定が必要だった三次元化の設定が環境にあわせて自動でデフォルト値を設定してくれることになったのは便利だと好評をいただきました。疑問点などを弊社のemailサポートにお問い合わせいただき問題解決につながった点も評価いただきました。三次元で動作を取得し3Dビューで動きを確認できるので、2次元の映像や実際には覗くことができないようなアングルで被写体の動きを眺めることができ、新しい気付きや発見につながることもあるそうです。
今後に期待すること
研究では複数点のマーカーを剛体として登録せずに、マーカー単体の位置情報だけを取得したいこともあります。特にリアルタイムに情報を取得されたい場合などは後編集でマーカーの入れ替わりを修正できても意味がありません。剛体として登録されていない2点間の距離や3点で作り出される角度などをリアルタイムにMotiveソフトウェアから出力できるようになると便利だとおっしゃっています。また収録データを解析するオフラインでの作業で、マーカー単体のラベルが入れ替わった場合にある程度オートマティックにつなぎ合わせてくれるような機能があるとよいと感じているそうです。スピードアップやトラッキング精度アップにつながる根本的な部分の改善は、概ねどのバージョンアップでも実施されます。またマーカーを三次元化するためのエンジンや詳細設定なども充実してきているため、入れ替わりや厳しい条件でのマーカー検出については以前よりずっと改善していますが、より安定してミスの少ないトラッキングができるよう期待したいと思います。
使用OptiTrackシステム
- OptiTrack Flex13 / 12台
使用ソフトウェア